

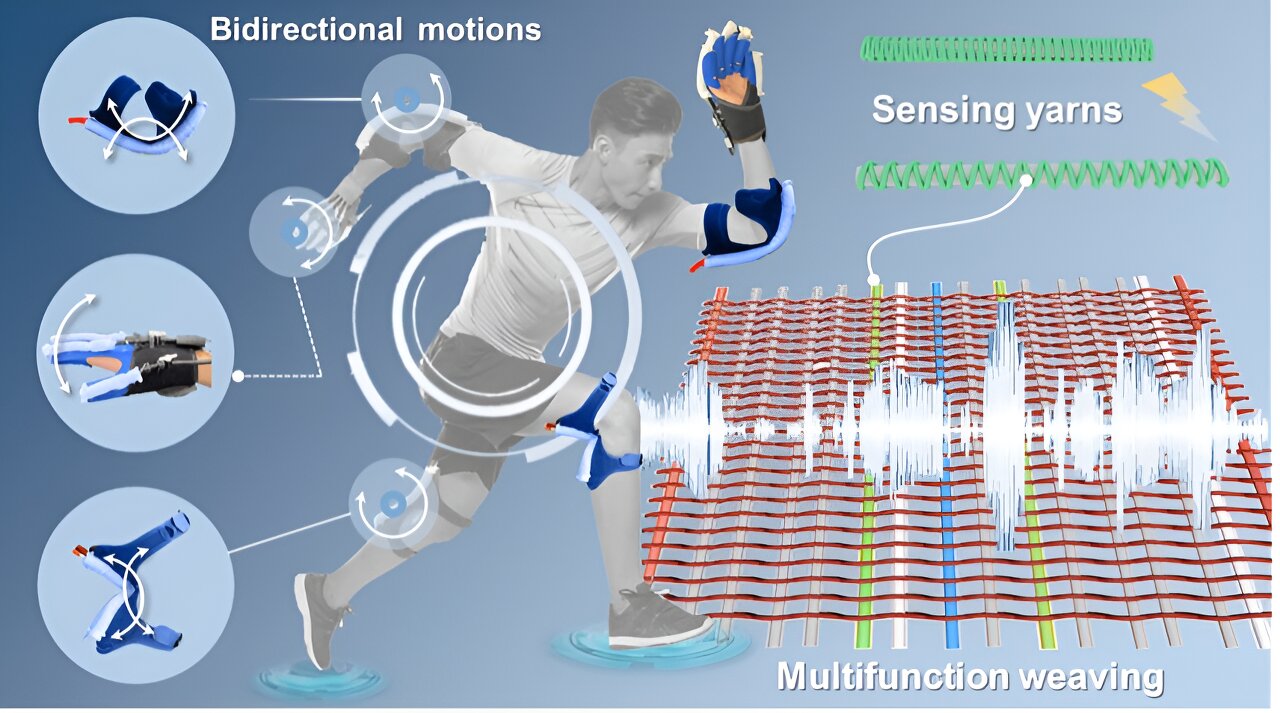
Schematic illustration of soft weaving robotics for wearable healthcare devices. Credit: Li et al.
Over the past few decades, electronics engineers have been developing increasingly flexible, versatile, and high-performance devices for a wide range of real-world applications. Some of their efforts have focused on creating smart, responsive textiles, which could be used to make stretchable robotic systems, medical devices, and wearable technologies.
Researchers from Jiangnan University recently presented a new textile engineering approach to fabricate soft, woven actuators for healthcare technologies and robotic systems. Their proposed manufacturing strategy, described in a paper published in Cell Reports Physical Sciencesis both scalable and easy to design, which could contribute to its future large-scale adoption.
“Conventional methods like 3D printing and elastomer molding do not fully meet the need for adaptability and comfort in soft robotics and wearable devices, especially in terms of developing integrated devices that are not only flexible and functional, but also inexpensive, easily customizable and scalable,” Dr. Fengxin Sun, corresponding author of the paper, told Tech Xplore.
“Inspired by the ‘thread-to-garment’ manufacturing method, we used dual-system weaving technology to seamlessly integrate sensing capabilities and actuation modes into soft robotic ‘garments’.”
The technology used by Sun and his colleagues allows the warp and weft threads (the two basic components used to transform yarns into fabrics) to be arranged in a clear planar pattern during weaving. This means that it allows for the customization of woven actuators, which is achieved by carefully programming the arrangement and composition of the threads.
“Our approach enables customized transformation and real-time sensing feedback, making woven actuators particularly effective for applications such as rehabilitation clothing,” said Dr. Sun. “Fabricating the sensing yarn is quite simple, resembling creating a braided hairstyle. Conductive yarns are braided in a helical pattern around stretchable core wires using an industrial braiding machine, creating pathways for the electrical current.”
When the wire used to weave the actuators is stretched, the paths for the electric current to flow are cut off due to the separation of the helices of the conductive wires. This change in structure in turn affects the electrical signals that flow through the wire, making it possible to detect deformations.
“The sensing threads we developed are embedded directly into the fabric of our woven actuators,” Dr. Sun said. “Essentially, as the actuator moves, the resistance of the thread changes, and this data can be used to understand how the actuator is working.”
The sensing threads produced using the team’s method have the unique feature of being entirely woven into fabric. This means they add no weight, stiffness or bulk to the textiles, allowing the actuators to monitor their own movements without losing their flexibility and adaptability.
“With dual-system weaving technology, we can tailor woven pneumatic actuators to inflate only in expected directions, effectively solving the “balloon-like” inflation problem faced by the soft robotics community,” said Dr. Sun.
“Furthermore, our weaving strategy offers a flexible and scalable solution for manufacturing multimorphic soft actuators, such as those capable of bending, twisting and spiraling bilaterally under a single air supply, by simply adjusting the yarn tension, density and woven structure.”
The researchers demonstrated the feasibility of their wire for the development of bilateral bending actuators, which could be used as soft robotic grippers. These grippers could be used to mimic animal movements, for example by reproducing the extension of octopus tentacles to attract and grasp objects.
“These actuators also have practical applications in wearable rehabilitation devices, where they can provide more precise and adaptive assistance to people with mobility issues,” said Dr. Sun. “The ability to program these actuators to mimic natural human movements means they could be used in a wide range of assistive technologies, making them more effective and comfortable for users.”
In the future, the textile engineering approach introduced by this team of researchers could be used to manufacture a wide range of flexible components for medical devices and robotic systems. Dr. Sun and his colleagues plan to continue working on advancing textile manufacturing for technological applications by developing other weaving and knitting strategies.
“We aim to develop textile actuators with improved efficiency and versatile movements in a more controlled manner,” added Dr. Sun. “We believe that improving the design of hierarchical textile structures will address key challenges facing the soft robotics community, such as balancing flexibility and toughness in soft actuators. This process could broaden the potential application of textile-based soft robotics and have a greater impact on daily life.”
More information:
Haoyun Li et al, Yarn cluster weaving, soft robotics with directional inflation, bilateral bending and self-sensing for healthcare, Cell Reports Physical Sciences (2024). DOI: 10.1016/j.xcrp.2024.102137
© 2024 Science X Network
Quote:Scalable woven actuators offer new possibilities for robotics and wearable devices (2024, August 20) retrieved August 20, 2024 from
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without written permission. The content is provided for informational purposes only.

{kind=link}