
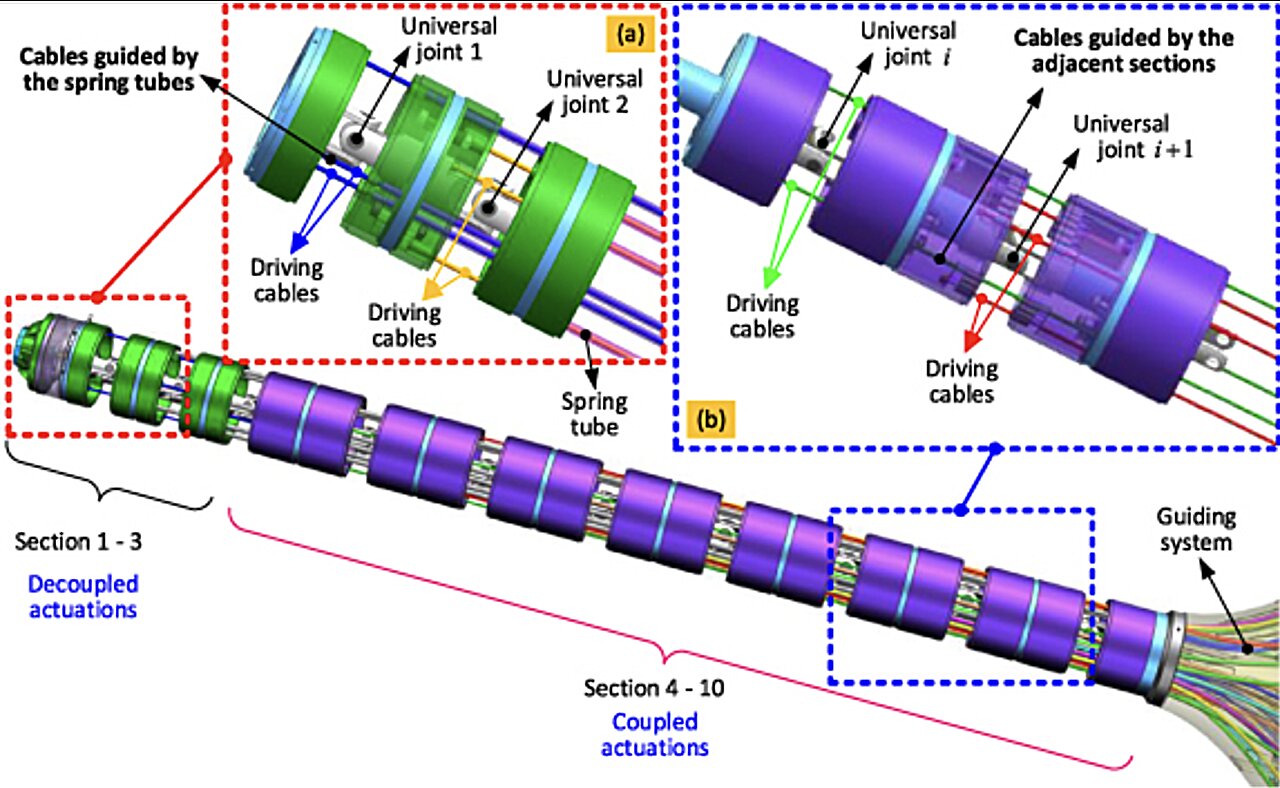
Schematic of the 20 DoF snake robot showing the structure of “macro-micro” operation: (a) shows the three tip sections with decoupled actuation; (b) shows the seven basic sections with coupled actuation. Credit: Ma et al
Nature-inspired robotic systems can help efficiently solve a wide range of problems, from navigating complex environments to smoothly completing team missions. In recent years, roboticists have created a growing number of bio-inspired systems designed to replicate the body structure and movements of various animals, including snakes.
Snake-like robots could have various advantages over other systems with more conventional body structures. With their flexible bodies and sliding movements, they could reach small, confined areas that would otherwise be difficult to access, for example when moving inside pipes, mines and other harsh environments.
Despite their potential, snake robots have not yet been successfully deployed on a large scale. This is due in part to the difficulties encountered when attempting to effectively modulate the stiffness of these systems, thereby allowing desired movements to be performed and target positions to be achieved with high precision.
Researchers from Lancaster University, Beijing Institute of Technology and North China University of Technology recently set out to develop a new design strategy that could help better regulate the stiffness of snake robots. Their proposed method, described in the journal Bioinspiration & Biomimeticswas applied to the development of a snake-shaped robotic arm with 20 degrees of freedom (DoF).
“Snake robots have been widely used in harsh environments, such as confined spaces,” Nan Ma, Haqin Zhou and colleagues wrote in their paper. “However, most existing snake robots with large length-to-diameter ratios have low rigidity, which limits their precision and usefulness. To address this, a new ‘macro-micro’ structure aided by a new global strategy of stiffness regulation is proposed in this article.
The macro-micro structure designed by this research team can improve the positional accuracy of snake-like robots when navigating confined spaces, both above and below ground. This structure is accompanied by a newly developed overall strategy to regulate the robot’s stiffness, as well as a kinetostatic model designed to estimate errors.
“Internal friction, variation of cable stiffness with tension, and their effects on the structural stiffness of the snake arm under different configurations were incorporated into the model to increase the modeling accuracy,” wrote Ma, Zhou and their colleagues. “Finally, the proposed models were validated experimentally on a physical prototype and a control system (error: 4.3% and 2.5% for straight and curved configurations, respectively).”
Ma, Zhou and their colleagues used the proposed design to develop a prototype system, which they then evaluated in a series of initial tests. Their results were very promising, as their strategy allowed them to adjust the tension of the cables driving the snake-like arm movements by 183.4% on average.
In the future, this recent study could inform the development of more capable snake-inspired robotic systems, which can be modulated with greater precision and thus better accomplish missions in complex and highly confined environments. These robots could prove incredibly valuable in assisting human agents during search and rescue operations, monitoring underground environments, and countless other advanced real-world applications.
More information:
Nan Ma et al, Comprehensive stiffness regulation on a multi-section snake robot taking into account the effects of movement and friction of parasites, Bioinspiration & Biomimetics (2023). DOI: 10.1088/1748-3190/ad0ffc
© 2023 Science X Network
Quote: A new strategy to regulate the rigidity of robots inspired by snakes (December 27, 2023) retrieved on December 27, 2023 from
This document is subject to copyright. Apart from fair use for private study or research purposes, no part may be reproduced without written permission. The content is provided for information only.

{kind=link}