

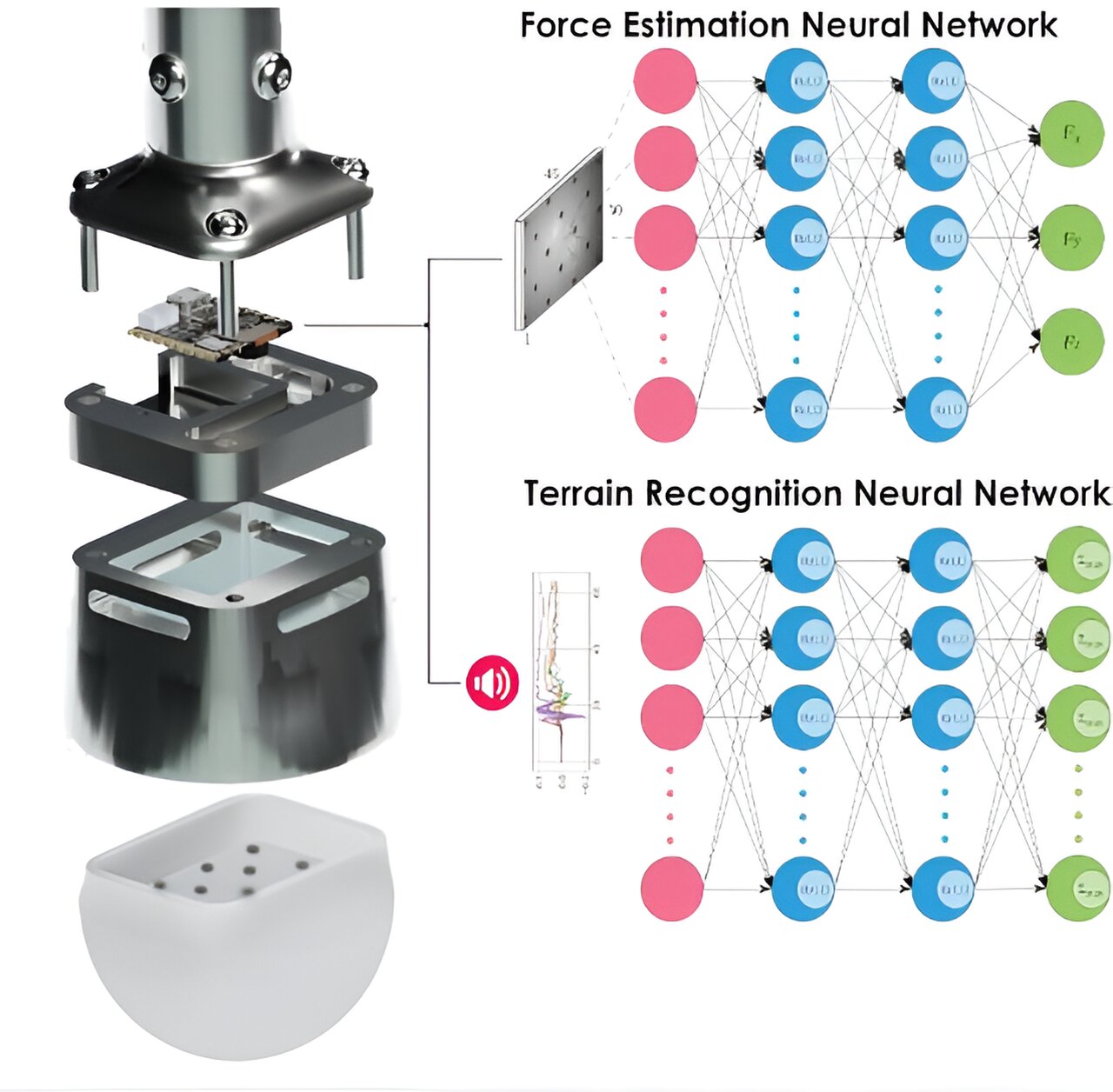
The image on the left shows the CAD design in an exploded view with the silicone tab with the pattern at the bottom, the aluminum housing in the center and the board with camera and microphone. The image on the right illustrates the neural networks used to estimate the force based on the deformation pattern and the neural network used to classify the terrain. Credit: Vangen et al.
Legged robots that artificially replicate the body structure and movements of animals could effectively accomplish missions in a wide range of environments, including various outdoor natural environments. But to do this, these robots must be able to walk on different terrains, like dirt, sand, grass, etc., without losing balance, getting stuck or falling.
Researchers from the Norwegian University of Science and Technology (NTNU) and the Indian Institute of Technology Bombay recently developed a new artificial leg with sensing capabilities that could help improve the ability of legged robots to move on various terrains. This “sensory” paw, presented in an article posted on the preprint server arXivcan recognize different terrains and their properties by estimating the force applied to its surface from the ground below.
“Our past research activities for the DARPA Subterranean Challenge, which was ultimately won by the CERBERUS team led by Professor Kostas Alexis, indicated the importance of a robust response to challenging terrains,” Tejal Barnwal, Professor Alexis and Jørgen Anker Olsen, authors of the study. paper, told Tech Xplore.
“Our team entered the competition with the ANYmal legged robot, a platform provided by our partners at ETH Zurich, and this was key to our success. Understanding the limitations of the state of the art, we concluded that improving the perception of a legged robot through sensory legs could make locomotion control even more reliable and adaptive.”
Previous studies have consistently reported on the difficulties that legged robots can encounter when moving across uneven and complex terrain. For example, they found that difficult terrain can restrict the movements of legged robots and create occlusions, preventing the robots from effectively sensing their surroundings.
In recent years, roboticists and computer scientists have attempted to develop computer methods capable of recognizing different terrains and modulating the movements of legged robots accordingly, in order to ensure their optimal locomotion. Yet many approaches proposed so far rely on sensors already integrated into robots, such as LiDAR sensors and cameras, which only provide a limited view of the environment and terrain the robots are walking on. .
“Integrating visual, tactile and audio information allows humans and animals to quickly adapt when walking or running across diverse terrains,” said Barnwal, Olsen and Alexis. “This multisensory approach enhances spatial awareness, improves balance, and facilitates rapid decision-making for safe navigation in varied environments. Likewise, providing quadrupeds with sonic terrain recognition and pressure information when moving Real-time foot effort can help them maintain balance and can help them effectively adapt their control and navigation strategies in various terrain situations.”
Barnwal, Olsen, Alexis and their colleague Alexander Vangen set out to develop a new system that could gather more detailed information about the terrain the robots are moving over in real time. They ultimately created an artificial paw or foot, called TRACEPaw, that can be integrated into the bottom of a robotic leg.
“Featuring a silicone-based hemispherical effector, TRACEPaw uses silicon deformation, an integrated micro-camera and a microphone for real-time estimation of 3D force vectors and recognition of various terrain types, including gravel, snow, sand and more,” the researchers explained.
“The paw effector responds to contact forces by deforming, while an integrated micro-camera captures images of the deformed interior surface inside the shoe. Simultaneously, a microphone captures audio signals during the interaction between the paw and the ground.”
The paw-shaped system created by Barnwal, Olsen, Alexis and Vangen collects a variety of sensory data from the environment, particularly the terrain below. Then this data is analyzed by a computer vision model trained by supervised learning, which can make predictions about a terrain and estimate what is called the contact force, based on the deformation of its silicon surface and the noise produced by the ground.
“The system uses simple but effective supervised learning models for vision-based 3D force estimation on silicone deformation and audio classification of floors, enabling real-time detection, calculation and inference” , the researchers said.
Another advantage of the detection system created by this research team is that it was created using commercially available electronic components. This means it could be manufactured on a large scale easily and cheaply.
“Our sensory paw was made using commercially available electronics and off-the-shelf components,” said Barnwal, Olsen and Alexis. “This can contribute to the accessibility, scalability and ease of in-house manufacturing of the system, which could facilitate its large-scale adoption and replication.”
The researchers evaluated the performance of their system in a series of laboratory experiments. Their initial findings were very promising, suggesting that TRACEPaw can significantly improve the mobility and utility of legged robots, allowing them to recognize and adapt to specific terrains.
“Our study also shows that edge computing, inside the paw, with supervised learning models can help with fast and reliable decision-making, improving the robot’s adaptability and responsiveness, crucial for navigate dynamic environments and prevent incidents such as slipping or tripping in unpredictable terrains,” the researchers said.
In the future, the artificial leg created by Barnwal, Olsen, Alexis and Vangen could facilitate the deployment of legged robots in real-world settings, such as during search and rescue or exploration missions. Meanwhile, the team plans to continue improving its system by training its underlying algorithm on more data, as this could further refine its force estimation and soil classification capabilities.
“In our future work, we will aim to improve the environmental understanding of the system by incorporating data from the onboard IMU, thereby providing insight into the slope of the terrain and direction of forces in the terrestrial setting,” the researchers added .
“We also plan to evaluate its performance in more complex multi-class terrains. Ultimately, the potential integration of TRACEPaw with a physical legged robot will enable a comprehensive evaluation of the integrated system’s performance in real-world scenarios.”
More information:
Aleksander Vangen et al, Terrain recognition and contact force estimation using a sensory paw for legged robots, arXiv (2023). DOI: 10.48550/arxiv.2311.03855
arXiv
© 2023 Science X Network
Quote: A sensing leg that could improve the ability of legged robots to move across different terrains (November 27, 2023) retrieved November 28, 2023 from
This document is subject to copyright. Apart from fair use for private study or research purposes, no part may be reproduced without written permission. The content is provided for information only.

{kind=link}