
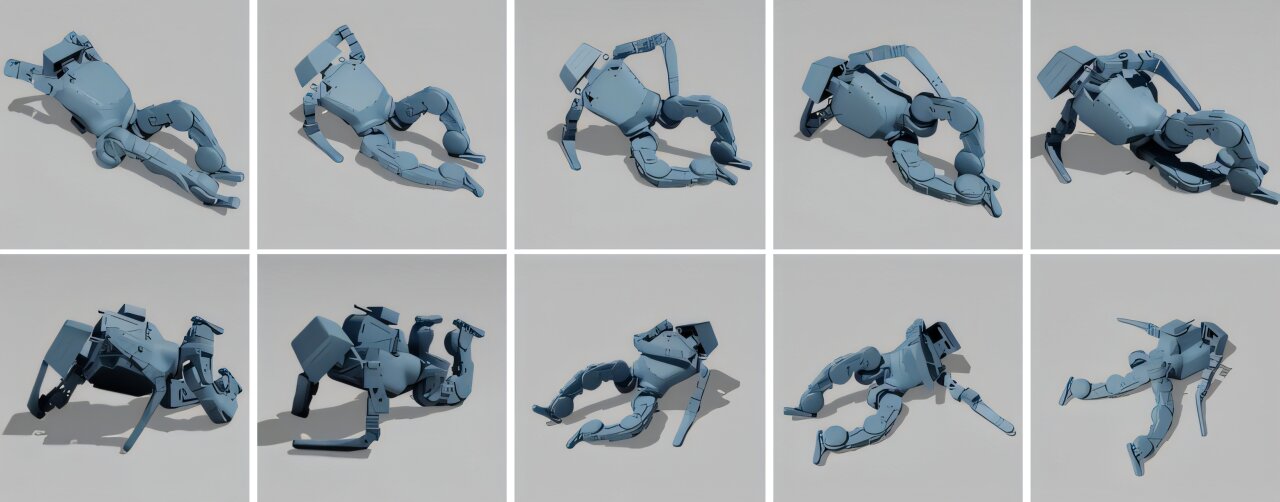
Final poses designed by artists. Visual examples of the final 10 artist-designed poses used in our experiments. Credit: arXiv (2025). DOI: 10.48550/arxiv.2511.10635
Bipedal (two-legged) robots are sophisticated machines, but they aren’t the most graceful when things go wrong. A simple push, fall or obstacle can send them crashing to the ground, often resulting in costly damage to sensitive components such as cameras.
To solve this problem, researchers at Disney Research in Zurich, Switzerland, developed a new system that ensures that when gravity causes a robot to fall, it falls gently and gracefully.
Existing techniques to protect robots when they tip over do not provide control or effectively minimize impact. The actuators can freeze, causing the robot to stiffen and hit the ground violently, or they can go limp, leaving the robot tumbling chaotically. Other methods rely on pre-programmed falling movements, but these only work for slow movements or simple falls.
The AI solution
In an article published on the arXiv preprint server, researchers describe how they used reinforcement learning to train robots to fall smoothly and safely. They ran thousands of virtual robots in a computer simulator and dropped them from every angle and position imaginable.
For each fall attempt, the virtual robots received a reward for minimizing the impact of the accident and for achieving a controlled landing in a target pose from a set of possible poses. Through this constant feedback, the robots learned a general strategy for executing a smooth crash, regardless of how the fall began.
The result was a set of rules (or policies) that were transferred to a real bipedal robot for testing. The team selected 10 graceful artist-designed final poses, then pushed or tripped the robot with a stick to make it fall at random angles. After repeated falls, the robot showed no noticeable damage and remained fully functional. He also consistently executed controlled falling movements, finishing in poses designed by the artist.
“Our method enables gentle falling behavior that protects the most sensitive part of the robot, regardless of the falling direction,” the researchers wrote in their paper. “This is the first general approach demonstrating user-controlled falling of a bipedal robot in the real world.”
Next steps
The Disney team now wants to build on this advancement by tackling several challenges, including testing its AI strategy on different types of robots, such as four-legged machines, to determine if it is universal.
They also want to develop a way for a robot to predict a fall, as the current system only takes over after a fall begins. Additionally, researchers would like to design a way for a robot to gracefully get up after hitting the ground.
Written for you by our author Paul Arnold, edited by Sadie Harley, and fact-checked and edited by Robert Egan, this article is the result of painstaking human work. We rely on readers like you to keep independent science journalism alive. If this reporting interests you, consider making a donation (especially monthly). You will get a without advertising account as a thank you.
More information:
Pascal Strauch et al, Robot Crash Course: Learning Soft and Stylized Falling, arXiv (2025). DOI: 10.48550/arxiv.2511.10635
arXiv
© 2025 Science X Network
Quote: Disney teaches a robot to fall gracefully and make a soft landing (November 18, 2025) retrieved November 18, 2025 from
This document is subject to copyright. Except for fair use for private study or research purposes, no part may be reproduced without written permission. The content is provided for informational purposes only.

{kind=link}