
Overview of the experimental setup for tactile detection in granular media. (a) Human experiment setup, showing a participant’s finger raking a sand-filled box with an LED strip guiding the trajectory and a cube buried at fixed locations. (b) Robotic experiment setup, including an UR5 arm with a touch sensor and a cube buried in the sand. (c) Schematic of the raking process. Credit: Queen Mary University of London
A study by researchers at Queen Mary University of London and University College London found that humans have a form of distance contact, or the ability to detect objects without direct contact, a feeling that some animals possess.
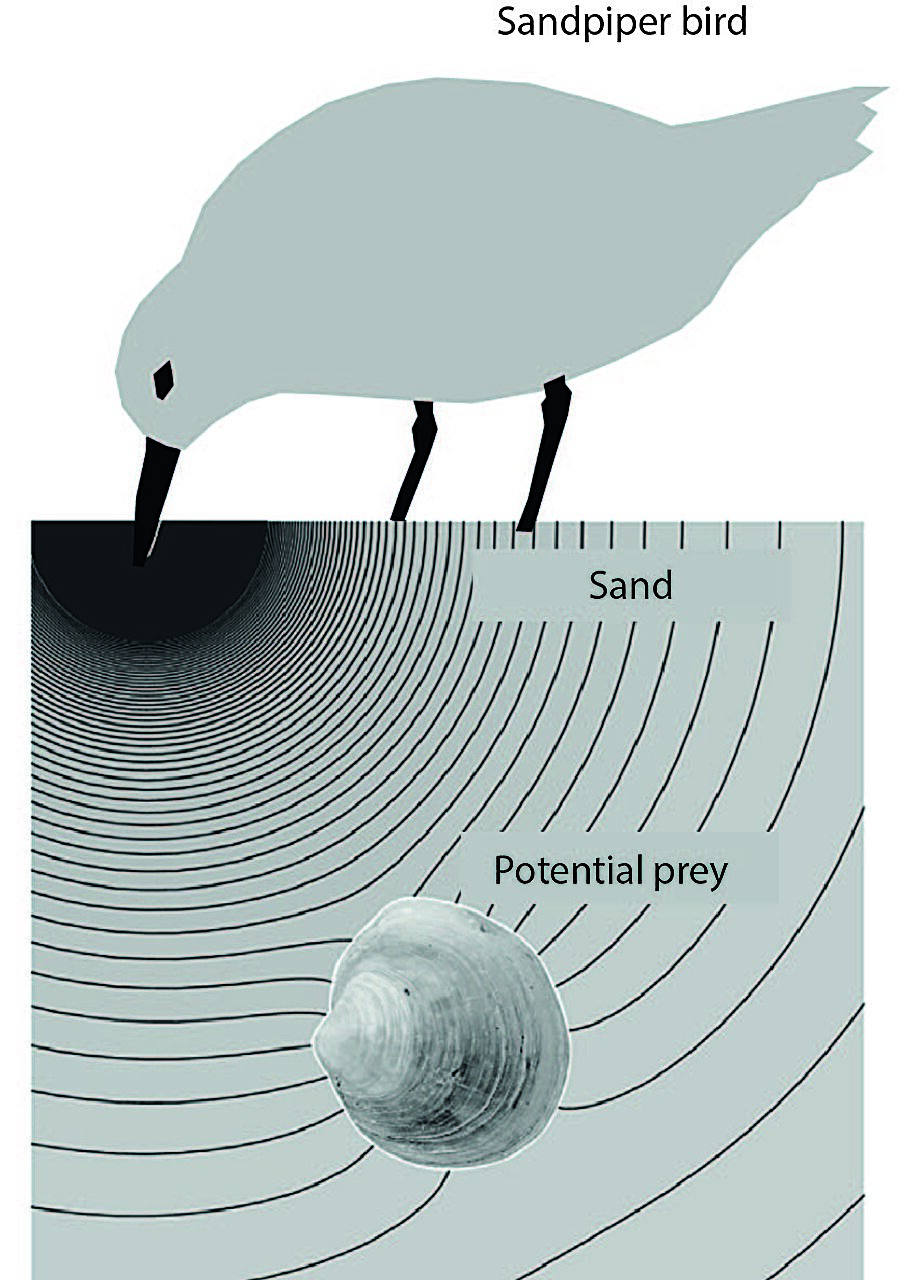
Human touch is generally understood as a proximal sense, limited to what we physically touch. However, recent discoveries about animal sensory systems have challenged this view. Some shorebirds, such as sandpipers and plovers, use a form of “distance contact” to detect prey hidden under the sand. Remote touch enables detection of objects buried beneath granular materials through subtle mechanical signals transmitted through the medium, when moving pressure is applied nearby.
The study from the IEEE International Conference on Development and Learning (ICDL) explored whether humans share a similar ability. Participants gently moved their fingers in the sand to locate a hidden cube before physically touching it. Remarkably, the results revealed an ability comparable to that observed in shorebirds, although humans do not possess the specialized beak structures that enable this sense in birds.
Results show human hands are more sensitive than expected
By modeling the physical aspects of the phenomenon, the study revealed that human hands are remarkably sensitive, detecting the presence of buried objects by perceiving tiny shifts in the sand around them. This sensitivity approaches the theoretical physical threshold of what can be detected from mechanical “reflections” in a granular material, when there is movement of the sand that is “reflected” on a stable surface (the hidden object).
A sandpiper (cassette red knot) produces a pressure field with its beak in a sandy sediment of a hypothetical mudflat. Modified from de Fouw et al. (2016) Animal behavior. Credit: Author: de Fouw. Modified from de Fouw et al. (2016) Animal behavior.
Are humans or robots better at remote touch?
Comparing the performance of a human with a robotic touch sensor trained using a Long Short-Term Memory (LSTM) algorithm, the humans achieved an impressive accuracy of 70.7% within the expected detection range. Interestingly, the robot could detect objects at slightly further distances on average, but often produced false positives, resulting in only 40% overall accuracy.
These results confirm that people can truly sense an object before physical contact, a surprising ability for a sense that typically concerns objects that come into direct contact with us. Both humans and robots performed very close to the maximum sensitivity predicted by physical models and movements.
Why is the study important?
This research reveals that humans can detect objects buried in sand before actual contact, expanding our understanding of the scope of the sense of touch. It provides quantitative evidence for a previously undocumented tactile skill in humans. The results also provide valuable reference points for improving assistive technologies and robotic touch sensing. Using human perception as a model, engineers can design robotic systems incorporating natural tactile sensitivity for real-world applications such as surveying, excavation or research tasks where vision is limited.
Lesser Yellowlegs by Russ – CC license attribution. Credit: Russ,
What are the broader implications?
Elisabetta Versace, senior lecturer in psychology and head of the Prepared Minds Lab at Queen Mary University of London, who designed the human experiments, said: “This is the first time that remote touch has been studied in humans and it changes our conception of the perceptual world (the so-called ‘receptive field’) in living things, including humans. »
Zhengqi Chen, a Ph.D. student in the Advanced Robotics Lab at Queen Mary University of London, said: “This discovery opens possibilities for designing assistive tools and technologies that extend human tactile perception. This information could inform the development of advanced robots capable of performing delicate operations.
“For example, locating archaeological artifacts without damage, or exploring sandy or granular terrain such as Martian soil or the seafloor. More broadly, this research paves the way for tactile systems that make hidden or dangerous exploration safer, smarter and more efficient.”
Lorenzo Jamone, associate professor of robotics and AI at University College London, said: “What makes this research particularly exciting is how human and robotics studies have informed each other. Human experiences guided the robot’s learning approach, and the robot’s performance provided new insights for interpreting human data.
The researchers conducted two studies: the first, a human study assessing fingertip sensitivity to tactile signals from buried objects; the second, a robotic experiment using a robotic arm equipped with tactile functions and a long-term memory model to detect the presence of objects.
The authors are Zhengqi Chen, PhD student at the Advanced Robotics Lab, Dr Laura Crucianelli, lecturer in psychology, Dr Elisabetta Versace, lecturer in psychology, all from Queen Mary University of London and Lorenzo Jamone, associate professor of robotics and AI at University College London.
More information:
Zhengqi Chen et al, Exploring tactile perception for object localization in granular media: a human and robotic study, 2025 IEEE International Conference on Development and Learning (ICDL) (2025). DOI: 10.1109/icdl63968.2025.11204359
Provided by Queen Mary, University of London
Quote: Humans have a tactile ‘seventh sense’ from a distance like sandpipers, research shows (November 7, 2025) retrieved November 7, 2025 from
This document is subject to copyright. Except for fair use for private study or research purposes, no part may be reproduced without written permission. The content is provided for informational purposes only.

{kind=link}