
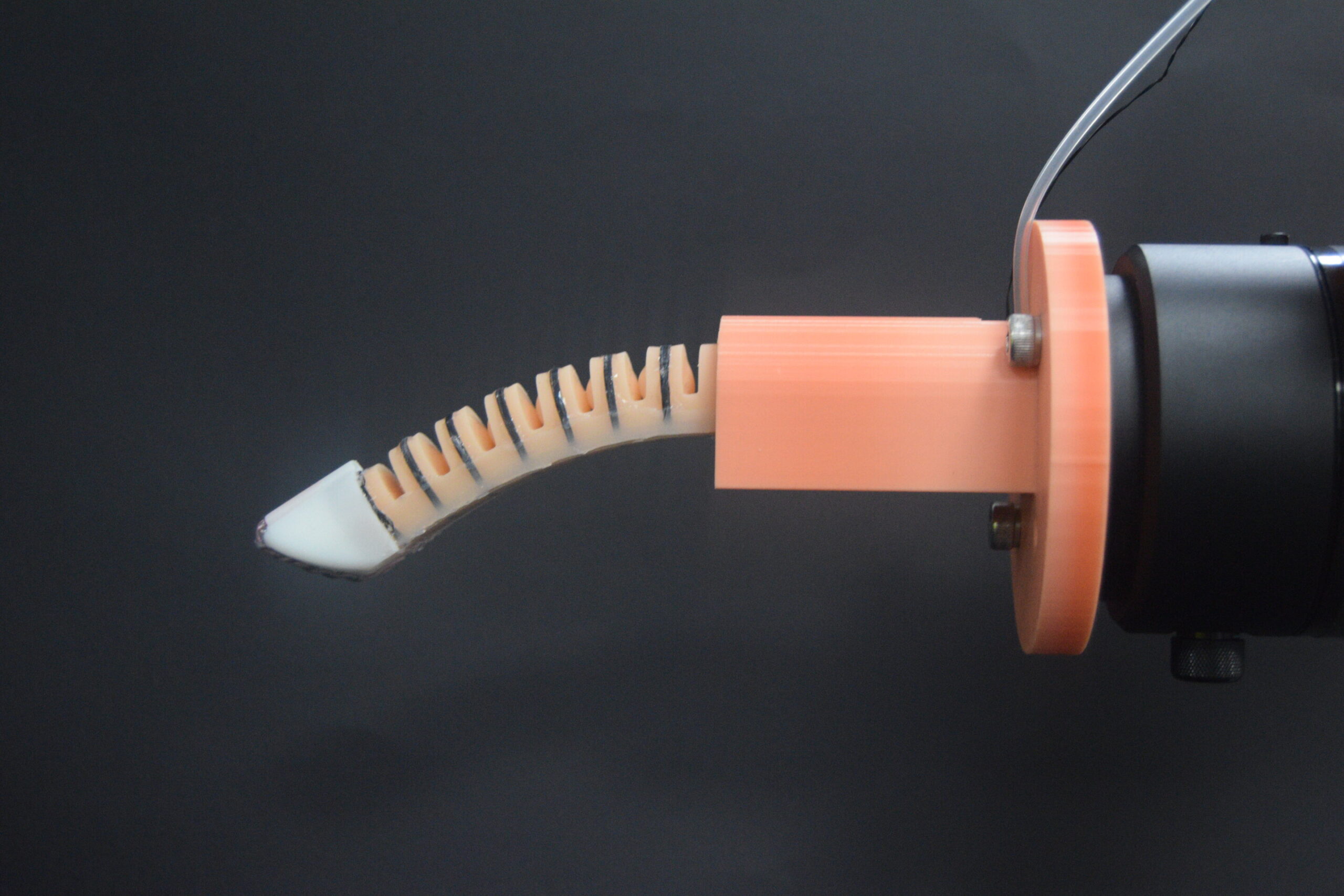
Robotic finger. Credit: Hongbo Wang
Researchers at the University of Science and Technology of China have developed a robotic “finger” with a sophisticated sense of touch that can perform routine exams in a doctor’s office, including taking a patient’s pulse and to look for abnormal masses. This work was published on October 9 in Cellular Reports Physical Sciences.
Such technology could make it easier for doctors to detect diseases such as breast cancer when they are easier to treat. It can also help patients feel comfortable during physical exams that may feel uncomfortable and invasive.
“Through further developments to improve its efficiency, we also believe that a dexterous hand composed of such fingers can act as a ‘robodoctor’ in a future hospital, like a doctor,” says Hongbo Wang, a researcher in sensing technologies at the University of Sciences. and technology of China and author of the study.
“In combination with machine learning, it is possible to achieve automatic robotic examination and diagnosis, which is particularly beneficial for those underdeveloped areas where there is a serious shortage of medical professionals.”
Although rigid robotic fingers already exist, experts have expressed concern that these devices may not be up to the delicate tasks required in a doctor’s office. Some have pointed to potential safety concerns, including fears that overzealous robotic fingers could cause bumps to break off during exams.
More recently, scientists have developed lightweight, safe and inexpensive soft robotics capable of recreating the movements of human hands. However, these devices are not able to detect the complex properties of the objects they touch like real fingers do.
“Despite the remarkable progress made over the past decade, most soft fingers presented in the literature still have substantial shortcomings compared to human hands,” the authors write, noting that robotic fingers are not yet ready to handle “real world” scenarios.
To overcome this challenge, the researchers developed a simple device containing coils of conductive fibers in two parts: a coil wound on each air chamber of the device’s bending actuators (the parts that allow it to move) and a fiber of twisted liquid metal mounted at the device. fingertip.
By measuring properties that affect how the device’s electrical current flows, the team found they could monitor, in real time, how far the finger bends when it touches an object and the force exerted at the tip of the finger. In this way, the device could perceive the properties of an object as effectively as human touch.
To test the device, the researchers began by passing a feather against the tip of a finger.
“The enlarged view clearly shows the change in resistance, indicating its high sensitivity in force detection,” the authors write.
Then, they tapped and poked the fingertip with a glass rod and bent the finger repeatedly, observing that the device’s sensors accurately perceived the type and amount of force they applied.
To test the finger’s medical chops, they mounted it on a robotic arm and watched it identify three bumps embedded in a large sheet of silicone, pressing on them as a doctor would. Once mounted on the robotic arm, the finger also correctly located an artery on a participant’s wrist and took their pulse.
“Humans can easily recognize the stiffness of various objects by simply pressing on them with their finger,” the authors write. “Similarly, since (the device) has the ability to detect both its bending deformation and the force exerted on the fingertip, it can detect stiffness similar to that of our human hand by simply pressing on an object. “
In addition to taking a pulse and examining simulated bumps, the researchers found that the robotic finger can type “like a human hand,” spelling out the word “hello.”
By using additional sensors to create even more flexibility in the joints of the robotic finger, allowing the device to move in multiple directions like a human finger, it could be ready to perform effective and efficient medical exams in the near future , conclude the authors.
“We hope to develop an intelligent and dexterous hand, as well as a robotic arm driven by artificial and sensory muscles, to mimic the unparalleled functions and fine manipulations of human hands,” Wang said.
More information:
Towards a human-like tactile sense via a bioinspired soft finger with self-decoupled bending and force sensing, Cellular Reports Physical Sciences (2024). DOI: 10.1016/j.xcrp.2024.102225. www.cell.com/cell-reports-phys … 2666-3864(24)00518-6
Quote: Meet the robotic ‘finger’ ready to check your pulse (October 9, 2024) retrieved October 9, 2024 from
This document is subject to copyright. Except for fair use for private study or research purposes, no part may be reproduced without written permission. The content is provided for informational purposes only.

{kind=link}