
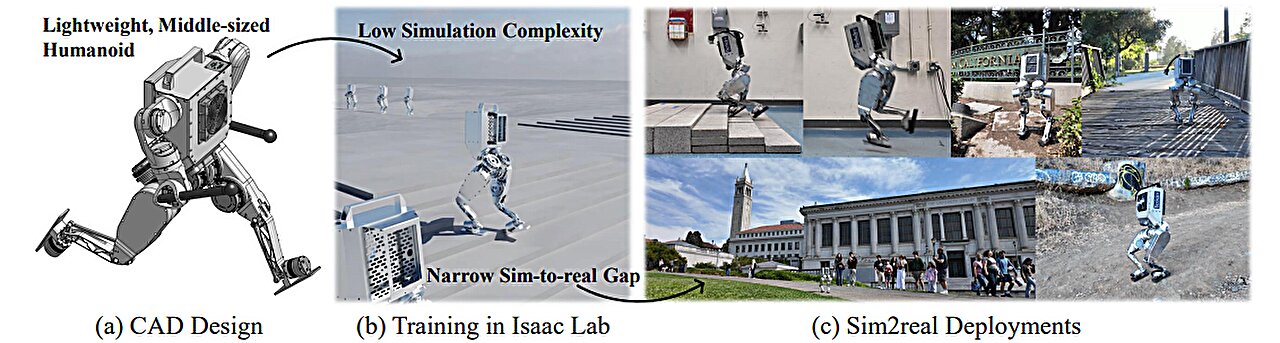
Design, training and deployment of our custom humanoid with a learning-based controller. Credit: arXiv (2024). DOI: 10.48550/arxiv.2407.21781
Advances in robotics are fueled by research, which itself relies heavily on efficient platforms to test robot control and navigation algorithms. While many robotic platforms have been developed over the past decades, most of them have shortcomings that limit their use in research settings.
Researchers at the University of California (UC) at Berkeley have recently developed Berkeley Humanoid, a new robotic platform that could be used to train and test control algorithms for humanoid robots. This new humanoid robot, presented in a paper published on the preprint server arXivaddresses and overcomes some of the limitations of previously introduced robotics research platforms.
“After conducting several experiments with commercially available robots, we became aware of some of their weaknesses,” Qiayuan Liao, a co-author of the study, told Tech Xplore. “For example, some components of the robots are very expensive, while others are not specifically designed for learning-based control or research, which often means they are ‘fragile,’ easy to break, and difficult to maintain and repair.”
The main goal of Liao and his colleagues’ recent work was to develop more cost-effective and scalable platforms for robotics research. These platforms should be inexpensive, easy for researchers to manufacture and experiment with, resilient to failure, easy to transport, require little maintenance, and can be operated by a single operator.
“The platform we developed, the Berkeley humanoid robot, features high performance, transparent low-level actuators and transmissions, higher reliability and affordability,” Liao explained. “We achieve this by designing and building everything from scratch, including mechanical and electrical components.”
Berkeley Humanoid is a compact, inexpensive, and lightweight robot that could be easily deployed in robotics labs. Its custom mechanical components include a gearbox and actuators, as well as its various limbs and body parts. Its electrical components, meanwhile, are a motor driver and an inertial measurement unit (IMU) module.
The researchers tested their robotic platform in a series of tests and demonstrated that it could effectively tackle various locomotion tasks, even when controlled by a basic learning policy. With this simple policy, the robot was able to walk on different terrains, hop on one or two legs, and walk long distances on urban and unpaved terrain.
“We have introduced a new high-performance, reliable, and low-cost humanoid research platform, and demonstrated amazing locomotion tasks with a simple learning-based policy,” Liao said. “The Berkeley Humanoid is designed specifically for academic research rather than direct deployment in industry. We want to accelerate algorithm development and experimental validation.”
Early tests have shown considerable promise for the Berkeley Humanoid, showing that it can support dynamic walking with different locomotion styles while maintaining stability on different types of terrain. The platform could soon be used both at Berkeley and in other robotics research labs to train and test new algorithms for robot control and navigation.
“We now hope to add arms to our robot to enable it to perform manipulation-related research,” Liao added. “In our future studies, we also hope to add perception capabilities using the camera to enable even better performance.”
More information:
Qiayuan Liao et al, Berkeley Humanoid: A Research Platform for Learning-Based Control, arXiv (2024). DOI: 10.48550/arxiv.2407.21781
arXiv
© 2024 Science X Network
Quote: Researchers develop new humanoid platform for robotics research (2024, August 28) retrieved August 28, 2024 from
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no part may be reproduced without written permission. The content is provided for informational purposes only.

{kind=link}